Dit artikel maakt deel uit van een groep van drie; de gemeenschappelijke factor is Variatierekening. In klassieke fysica wordt variatierekening toegepast in drie gebieden: Optica, Statica, en Mechanica. Bespreking van de toepassing in statica is onderdeel van het 'Grondslagen' artikel.
De andere twee artikelen:
| Grondslagen: | Variatierekening | |
| Optica: | De stationaire tijd van Fermat |
De Energie-Positie vergelijking
1. Van F = ma naar het Arbeid-Energie theorema
2. Van Arbeid-Energie naar stationaire actie
3. Test trajecten: effect van variatie
3.1 Potentiaal neemt lineair toe met de hoogte
3.2 Potentiaal neemt kwadratisch toe met de verplaatsing
3.3 Potentiaal neemt toe evenredig met de derde macht van de verplaatsing
Appendix I De betekenis van stationair
Appendix II Jacobs Lemma
Appendix III Polynoom
Over Hamiltons stationaire actie:
De gebruikelijke presentatie is dat Hamiltons stationaire actie als een gegeven naar voren wordt gebracht, en dat vervolgens wordt getoond dat uit Hamiltons stationaire actie \({F=ma}\) kan worden herleid.
Interessant is: de andere kant op werken is ook mogelijk. Dat wil zeggen: starten met \({F=ma}\) en dan naar Hamiltons stationaire actie gaan. het volledige proces heeft twee fasen:
- Afleiding van het Arbeid-Energie theorema met \({F=ma}\) als startpunt
- Demonstratie dat wanneer het Arbeid-Energie theorema geldig is Hamiltons stationaire actie óók geldig is.
Het Arbeid-Energie theorema en Hamiltons stationaire actie hebben gemeenschappelijk dat de fysica die plaatsvindt wordt beschreven in termen van kinetische energie en potentiële energie.
Potentiële energie definiëren
De volgende eigenschap is nodig om een welgedefiniëerde uitdrukking voor potentiële energie te hebben: voor een voorwerp dat van een punt A naar een punt B beweegt onder invloed van een kracht: de kracht moet zodanig zijn dat de hoeveelheid arbeid die is verricht om van A naar B te bewegen onafhankelijk is van welk traject tussen de twee punten is afgelegd.
Zoals we weten: het concept van behoud van energie als een Principe is dat wordt aangenomen dat het geldig is zonder enige restrictie. Wanneer aan iets een overkoepelende geldigheid wordt toegeschreven: dat zijn dingen die de status van Principe hebben.
The bespreking in dit artikel is voor een toegespitste context: voor een voorwerp in beweging, onderhevig aan een conservatieve kracht, is er de eigenschap dat de som van kinetische energie en potentiële energie een constante is.
1. Van F = ma naar het Arbeid-Energie theorema
In voorbereiding: afleiding van een kinematische relatie tussen de integraal van acceleratie naar positie aan de ene kant, en snelheid aan de andere kant.
De volgende twee relaties zijn wat nodig is, en ze zijn ook voldoende:


Laat a staan voor een willekeurig acceleratie-profiel. Dit acceleratie-profiel wordt geïntegreerd van een startpunt s0 naar een eindpunt s
Gebruik (1.1) voor substitutie, met corresponderende verandering van de limieten.
Wissel van volgorde van de factoren a en v:
Gebruik (1.2) voor subsititutie, met corresponderende verandering van de limieten.
Evaluatie van (1.6):
Ik wil benadrukken hoe algemeen de geldigheid van (1.7) is. De elementen ervan zijn de definities (1.1) en (1.2), en de wiskunde van differentiatie/integratie. Dat wil zeggen: de geldigheid van (1.7) is onafhankelijk van enige fysica.
Het Arbeid-Energie theorema
Als startpunt: het kracht-acceleratie principe:
Voor allebei de termen: integratie naar positie-coördinaat:
Gebruik (1.7) om de rechterkant te uit te werken. Resultaat: het Arbeid-Energie theorema:
Het Arbeid-Energie theorema levert de definities van potentiële energie en kinetische energie.
Historisch: gedurende meerdere eeuwen, van de tijd van Huygens tot en met de tijd van Hamilton, werd het concept van 'levende kracht' gebruikt, dat was gedefiniëerd als \(mv^2\). Het was rond 1850 dat de fysica gemeenschap verschoof naar een nieuwe naam en een nieuwe definitie: \(\tfrac{1}{2}mv^2\). De nieuwe definitie van kinetische energie was in termen van een integraal: integraal van \(ma\) van een start-positie naar een eind-positie. Het voordeel van die verschuiving: door kinetische energie te definiëren in termen van een integraal werd het concept van kinetische energie gedefiniëerd in termen van het Arbeid-Energie theorema.
Om de structuur van het Arbeid-Energie theorema te benadrukken geef ik de elementen in een tabel. Voor ieder vak: de uitdrukking in dat vak volgt wiskundig uit de uidrukkingen in de rij erboven.
|
|
|
|
|
|
|||
|
|
|||
Potentiële energie
Historisch: het concept van potentiële energie kwam al op voordat het Arbeid-Emergie theorema de tegenwoordige vorm had bereikt. Terugkijkend kunnen we herkennen dat het concept van potentiële energie nuttig gebruikt maakt van het Arbeid-Energie theorema.
Potentiële energie is gedefiniëerd als minus de linkerkant van (1.9): de integraal van kracht over afstand.
Als de hoeveelheid verrichte arbeid onafhankelijk is van hoe een voorwerp van s0 naar punt s beweegt dan geldt:

(1.12) combineert drie uitdrukkingen. Ik presenteer deze drie uitdrukkingen als een eenheid om de onderlinge verbondenheid te benadrukken. De vorm is verschillend; de fysica inhoud van de drie is hetzelfde.
![\begin{array}{rcl}
F & = & ma \\[+10pt]
\int_{s_0}^s F \ ds & = & \tfrac{1}{2}mv^2 - \tfrac{1}{2}mv_0^2 \\[+10pt]
-\Delta E_p & = & \Delta E_k
\end{array}](../action_img/20211019_185500_690x301.png)
2. Van Arbeid-Energie naar stationaire actie
Inleiding:
Een groot deel van deze sectie bestaat uit voorbereiding, basis leggen.
Nadat die basis is gelegd komt een sectie waarin achtereenvolgens de volgende twee punten aan de orde komen:
- Waarom is het zo dat er in de lagrangiaan \( (E_k - E_p) \) een minus-teken staat, wat is de achtergrond van dat minus-teken?
- Wat maakt dat de integraal van de lagrangiaan kan worden gebruikt om de beweging te evalueren?
2.1 Voorbereiding: bespreking van de notatie van Hamiltons stationaire actie en van de Euler-Lagrange vergelijking
Wat er in het diagram wordt weergegeven: een object is omhoog geworpen, en het voorwerp is vanaf dat punt onderhevig aan een kracht die toeneemt met de derde macht van de hoogte. De startsnelheid is zo uitgemikt dat na twee eenheden van tijd het voorwerp weer terug arriveert op de hoogte nul.
Over die derde macht potentiaal: een dergelijke potentiaal daadwerkelijk tegenkomen is natuurlijk zeer onwaarschijnlijk, maar dat maakt niet uit; stationaire actie is geldig voor iedere welgedefiniëerde potentiaal. De derde macht leent zich goed voor een levendige demonstratie van het stationaire actie concept.
Diagram 2.1 zet uit hoe in de diagrammen op deze pagina de variatie is geïmplementeerd. De doorgetrokken grijze lijn toont het ware traject. De verzameling stippen geeft het variatie-traject weer. In het diagram wordt het variatie-traject gegenereert door de hoogte van het ware traject te vermenigvuldigen met de waarde van de schuifregelaar.
Toepassing van variatie
De potentiële energie is evenredig met de derde macht van de verplaatsing
In diagram 2.1 is één schuifregelaar geïmplementeerd. Dat houdt in dat in diagram 2.1 de variatie-ruimte een 1-dimensionale ruimte is: de waarde van de schuifregelaar.
(Voor opties van onderverdeelde aanpassing: de diagrammen in sectie 3 van dit artikel hebben meerdere schuifregelaars.)
Merk op: wanneer je de schuifregelaar beweegt dan bewegen de stippen in de richting van de hoogte coördinaat. Het idee van variatierekening is dat de variatie wordt toegepast in de richting van de positie-coördinaat.
(Als er meerdere vrijheidsgraden zijn dan wordt voor iedere vrijheidsgraad afzonderlijk variatie toegepast.)
In voorbereiding:
Hamiltons stationaire actie en dimensionale analyse
Recapituleren: de vorm van Hamiltons actie:
(2.1.1) geeft de variationele uitdrukking: het ware traject heeft de eigenschap: de afgeleide van Hamiltons actie naar variatie is nul:
(2.1.1) volgt de conventie van gebruik van de griekse kleine letter \( \delta \) om uit te drukken dat de differentiatie naar de toegepaste variatie is.
Over de Euler-Lagrange operator:
(2.1.2) geeft de algemene vorm, voor toepassing in mechanica, van de Euler-Lagrange differentiële operator, voor een lagrangiaan \(L\)
Met de Lagrangiaan \( (E_k-E_p) \) ingevoegd in de Euler-Lagrange operator wordt de operator gebruikt om een vergelijking op te stellen:
(2.1.3) kan in meerdere opzichten vereenvoudigd worden. Om te beginnen: twee van de termen zijn in alle omstandigheden nul:
\(\tfrac{\partial E_k}{\partial s} = 0\), \(\tfrac{\partial E_p}{\partial v} = 0\)
Voor de resterende enkele differentiatie: notatie als partiële differentiatie is niet nodig:
\(\tfrac{\partial E_p}{\partial s} = \tfrac{d E_p}{d s}\) and \(\tfrac{\partial E_k}{\partial v} = \tfrac{d E_k}{dv} \)
Tezamen:
\(\frac{\partial (E_k-E_p)}{\partial s} = \frac{d(-E_p)}{ds} \) and \(\frac{d}{dt}\frac{\partial (E_k-E_p)}{\partial v} = \frac{d}{dt}( \frac{dE_k}{dv}) \)Het bovenstaande toont dat (2.1.3) vereenvoudigt naar onderstaande uitdrukking:
Over de differentiërende handelingen die worden toegepast op de \(E_p\) term, respectievelijk de \(E_k\) term: ze zien er verschillend uit, maar er is een nauw verband tussen de twee.
Het punt is: de differentiërende handeling die wordt toegepast op de \(E_k\) term moet dimensionaal hetzelfde zijn als de differentiërende handeling voor de \(E_p\) term.
In (2.1.5) is de dimensionaliteit van (2.1.4) expliciet gemaakt door de waarde van de snelheid \(v\) uit te drukken in de vorm \(\tfrac{ds}{dt}\).
In (2.1.6): \(dt\) komt twee keer voor, en dimensionaal vallen die twee keer tegen elkaar weg. Verderop zullen we hierop terugkomen.
2.2 Differentatie en integratie zijn elkaars omgekeerde
Differentiatie naar positie-coördinaat
We beginnen met herhaling van (1.10), het arbeid-energie theorema:
Neem het arbeid-energie theorema, en differentiëer naar positie-coördinaat \(s\):
We hebben het fundamentele theorema van Analyse: differentiatie en integratie zijn elkaars omgekeerde. In de afleiding van het Arbeid-Energie theorema hebben we gezien dat integratie van \(ma\) naar positie-coördinaat \(s\) resulteert in \(\tfrac{1}{2}mv^2\).
Dat wil zeggen: we weten al dat de differentiatie van (2.2.2) de uitdrukking zal terugbrengen naar \({F=ma}\).
Over onderstaande uitdrukking:
Aan de linkerkant staat hoe (2.2.2) de uitdrukking \(\tfrac{1}{2}mv^2\) differentiëert; aan de rechterkant staat hoe de Euler-Lagrange vergelijking de uitdrukking \(\tfrac{1}{2}mv^2\) differentiëert. Beide differentiaties geven \(ma\), het produkt van massa en acceleratie.
Voorbereiding voor (2.2.3) was met (2.1.6), de twee handelingen zijn dimensionaal hetzelfde. Van even groot belang: de context is dat positie \(s\), snelheid \(v\) en acceleratie \(a\) onderling verbonden zijn via differentiatie. Vergelijk de progressie van (1.3) naar (1.7). De onderlinge verbanden maken het mogelijk om de integratie van acceleratie naar positie-coördinaat te transformeren naar een integraal naar snelheid.
(2.2.2) kan worden herschreven in de volgende vorm:
The equivalentie van (2.2.3) toont: de lagrangiaan \( (E_k-E_p) \) invoegen in de Euler-Lagrange differentiële operator geeft een uitdrukking die de energie differentiëert naar de positie-coördinaat.
Ik zal naar de vorm (2.2.2) verwijzen met de naam 'energie-positie vergelijking'; differentiatie van de energie naar positie-coördinaat.
In voorbereiding: herhaling van (2.2.2):
Herschrijven als \(E_k\) en \(E_p\), en wat herschikken.
Er is de optie om de twee min-tekens tegen elkaar telaten wegvallen:
De twee min-tekens tegen elkaar laten wegvallen maakt dat de uitdrukking er rustiger uitziet, maar er is ook enigzins een verlies: de betekenis van het min-teken van \(-E_p\) is dat potentiële energie is gedefiniëerd als minus verrichte arbeid. Deze voorbereiding benadrukt de betekenis van het min-teken van \(-E_p\); verderop zal de vorm (2.2.7) worden gebruikt.
Diagram: effect van toegepaste variatie
In het onderstaande interactieve diagram: in het tweede paneel worden de kracht en de acceleratie weergegeven. Ter vereenvoudiging: de waarde van de massa \(m\) is op '1' gezet, zodat de waarde van de acceleratie hetzelfde is als de waarde van de kracht.
Wanneer je met de schuifregelaar variatie toepast: het diagram toont voor ieder punt in de variatie-ruimte wat de kracht zou zijn als dat voorwerp langs dat traject zou bewegen, en wat de acceleratie zou zijn als dat voorwerp langs dat traject zou bewegen. Er is één punt in de variatie-ruimte waar de kracht en de acceleratie onderling overeenstemmen. Dat punt in de variatie-ruimte valt samen met het ware traject.
Zoals eerder genoemd, het geval dat in het diagram is weergegeven is dat van een potentiaal die toeneemt met de derde macht van de hoogte. Dichtbij hoogte nul is de uitgeoefende kracht nog klein, dus in dat deel van het traject is er weinig verandering in de hellingshoek van de curve. Naarmate het voorwerp hoger komt neemt de kracht kwadratisch toe met de hoogte, waardoor er bovenaan een snelle omkering van de richting van bewegen is.
Bij het verschuiven van variatie: de verandering van de acceleratie is recht evenredig met de waarde van de variatie parameter 'p'. Voorbeeld: wanneer je het variatie-traject half zo hoog maakt als het ware traject dan is de corresponderende acceleratie half zo groot.
Bij verschuiven van de variatie: de potentiaal is hier evenredig met de derde macht van de hoogte; de kracht is evenredig met het kwadraat van de hoogte.
Wanneer de je schuifregelaar voor variatie beweegt van 0.0 naar 1.0 naar 2.0:
- Met de schuifregelaar nog dichtbij 0.0: daar groeien de groene balken langzamer dan de rode balken
- rondom 1.0 groeien de groene balken sneller dan de rode balken
Het diagram laat zien: er is verschiul in de manier waarop de acceleratie reageert op variatie en de manier waarop de kracht reageert op variatie. De manier waarop ze verschillend zijn is zo dat er in de variatie-ruimte één punt is waar de twee overeenkomen: als het variatie-traject samenvalt met het ware traject.
De differentiatie omzetten, van positie-coördinaat naar toegepaste variatie
In diagram 2.2: het onderste paneel toont de volgende twee waardes: de waarde van de kracht \(F\) als functie van de toegepaste variatie, en de waarde van de versnelling \(ma\) als functie van de toegepaste variatie.
Om te komen naar een uitdrukking in termen van energie: de kracht kan worden uitgedrukt als potentiële energie gedifferentiëerd naar variatie, en de versnelling kan worden uitgedrukt als kinetische energie gedifferentiëerd naar variatie.
In (2.2.8) heb ik de notatie \({\lvert \ \rvert}\) gebruikt zodat er alleen wordt gekeken naar de grootte van de waarde. Dit is een tijdelijke maatregel. Voor nu: niet naar de mintekens te hoeven kijken is behulpzaam.
I heb de notitie \(F\) en \(ma\) gebruikt, maar hier moet dat worden gelezen als de waarden langs de lengte van het test traject. Dat zijn virtuele waarde, want de toegepaste variatie is een virtuele verandering. Deze virtuele waarden komen alleen overeen met de ware kracht en de ware versnelling op het punt in de variatie-ruimte waar het test traject samenvalt met het ware traject.
(2.2.9) geeft hoe differentiatie van potentiële energie naar toegepaste variatie zich verhoudt tot differentiatie van potentiële energie naar positie-coördinaat.
De relatie is 1-op-1; voor de potentiële energie hebben de twee differentiaties dezelfde uitkomst.
(2.2.10) geeft hoe differentiatie van kinetische energie naar toegepaste variatie zich verhoudt tot differentiatie van kinetische energie naar positie-coördinaat.
Over waarom in (2.2.10) de twee differentiaties op die manier verschillend zijn:
De differentiatie naar positie-coördinaat volgt de beweging langs het ware traject. Snelheid is gekoppeld aan positie-cooördinaat: \(v = \tfrac{ds}{dt}\). Bij differentiatie naar positie-coördinate zijn kinetische energie en potentiële energie gekoppeld.
Aan de andere kant: toegepaste variatie is een virtuele verandering; er is geen fysieke tegenhanger. Voor wat betreft de toegepaste variatie zijn de potentiële energie en de kinetische energie onafhankelijke waarden.
Voor beweging langs het ware traject geldt: wanneer het object tegen de potentiaal gradiënt in beweegt neemt de kinetische energie af. Maar voor virtuele verandering: het test traject opschuiven in de richting tegen de potentiaal gradiënt in maakt de hellingshoek van het test traject groter; toename van snelheid; toename van hypothetische kinetische energie.
Hieronder naast elkaar de relatie voor het geval van differentiatie naar positie-coördinaat, en de relatie in het geval van differentiatie naar toegepaste variatie:
De conventie is om het minteken aan de potentiële energie toe te kennen, ook al is het feitelijk de kinetische energie waarbij er een omkering ten opzichte van de x-as is.
Dat het minteken aan de potentiële energie wordt toegewezen in plaats van aan de kinetische energie is een historische kronkel.
Om misverstand te voorkomen: er is hier geen goed of fout. Om het ware traject vinden: vind het punt in de variatie-ruimte waar de twee termen dezelfde waarde hebben. Wanneer \(dE_k/\delta s\) gelijk is aan \(dE_p/\delta s\) dan zijn \( (dE_p/\delta s - dE_k/\delta s)\) en \( (dE_k/\delta s - dE_p/\delta s)\) allebei nul, dus voor het eindresultaat maakt het niet uit.
De afgeleide naar variatie gebruiken als plaatsvervanger
(2.2.12) kan dienen als plaatsvervanger voor de vergelijking met differentiatie naar positie-coördinaat.
De geldigheid zet door naar de tijd-integraal
In diagram 2.2: de verzameling van alle rode balken definiëert een oppervlak; de verzameling van alle groene balken definiëert een oppervlak. Dat wil zeggen: diagram 2.2 laat zien dat over-het-hele-tijd-interval geldigheid van (2.2.12) doorzet naar de integraal van (2.2.12)
Op basis van (2.2.12): voor ieder tijd-interval \({(t_1, t_2)}\):
Merk op: dit is onafhankelijk van enige specifieke keuze van \(t_1\) and \(t_2\). Dit is de eis: binnen het domein: de relatie moet geldig zijn voor ieder tijd-interval \({(t_1, t_2)}\). Voor deze geldigheid is er geen ondergrens voor hoe klein het interval \({(t_1, t_2)}\) kan zijn. Met het interval \({(t_1, t_2)}\) infinitesimaal klein is (2.2.13) ook geldig.
Differentiatie en integratie zijn lineaire bewerkingen
Gegeven dat differentiatie en integratie lineaire handelingen zijn: de integraties kunnen worden gecombineerd:
The differentiaties kunnen worden samengevoegd:
Op dit punt zijn de termen \(E_k\) en \(E_p\) al in de structuur van de Lagrangiaan \({(E_k - E_p)}\)
De volgende uitdrukking is een specifieke instantie van de Leibniz integraal regel (Leibniz integraal regel waarbij de limieten van de integratie een getal zijn):
De differentiatie kan van binnen de integraal naar de buitenkant worden gebracht. Deze verandering van volgorde van de differentiatie en de integratie verandert de uitkomst niet.
Met de differentie aan de buitenzijde van de integratie zijn we aanbeland bij Hamiltons stationaire actie. Onderstaande uitdrukking is de rechterkant van (2.2.16). Onderstaande uitdrukking is hetzelfde als (2.1.1).
2.3 Overzicht: de elementen die in samenstelling Hamiltons stationaire actie vormen:
Op basis van de definities \(v=\tfrac{ds}{dt}\), \(a=\tfrac{dv}{dt}\):
In combinatie met \(F=ma\):
Gegeven dat differentiatie en integratie elkaars omgekeerde zijn weten we dat differentiatie naar positie-coördinaat de uitdrukking terug naar \({F=ma}\) zal brengen:
Positie, snelheid en acceleratie zijn onderling verbonden via differentiële relaties: \({v=\tfrac{ds}{dt} \ \text{and} \ a=\tfrac{dv}{dt}}\): for \(s\), \(v\) and \(a\) zijn de volgende differentiatie handelingen equivalent:
Differentiatie naar toegepaste variatie kan dienen als plaatsvervanger voor differentiatie naar positie coordinaat.
De eis is dat de twee termen in (2.3.6) overal aan elkaar gelijk zijn. Het traject dat daaraan voldoet heeft daarmee de eigenschap dat de integralen aan elkaar gelijk zijn:
Differentiëren en integreren zijn lineaire operaties: de volgorde van de handelingen maakt niet uit voor de uitkomst:
En zo: Hamiltons stationaire actie.
2.4 Visueel overzicht
Potentiaal evenredig met de derde macht van de hoogte
Diagram 2.3 is een uitbreiding van diagram 2.2, met toevoeging van twee panelen.
Derde paneel: Emergie als functie van tijd. Wanneer je met de schuifregelaar variatie toepast dan toont het diagram de waarde van de energie die correspondeert met de waarde van de variatie parameter \(p\).
vierde paneel:
In het vierde paneel toont curves als functie van de variatie parameter \(p\); de horizontale as is de waarde van de variatie-parameter \(p\)
- rode curve: \(\int E_k dt\), integraal van de kinetische energie
- groene curve: \(\int -E_p dt\), integraal van minus potentiële energie
- blauwe curve: \(\int (E_k - E_p) dt\), integraal of the Lagrangiaan \( (E_k-E_p)\)
op het punt in de variatie-ruimte waar het variatie-traject samenvalt met het ware traject: de afgeleide van \(\int (E_k - E_p) dt\) naar de variatie-parameter \(p\) is nul.
Merkk op: het criterium is: afgeleide-is-nul.
Of het punt afgeleide-is-nul een minimum of een maximum is speelt geen rol.
3. Variatie-trajecten: reactie op variatie
De volgende drie diagrammen zijn drie instanties van een patroon, voor drie successievelijke klassen van gevallen.
Over het werken met de schuifregelaars: om het ware traject te vinden: manipuleer het variatie-traject naar een staat waarbij de hellingshoek van de kinetische energie curve (rood) overal hetzelfde is als de hellingshoek van de minus potentiële energie curve (groen). Wanneer die twee hellingshoeken gelijk zijn dan is de afgeleide van Hamiltons actie nul.
3.1 Potentiaal recht evenredig met de hoogte
Potentieële energie neemt toe evenredig met de hoogte; het traject is een parabool
Diagram 3.1 is voor het geval van een uniforme kracht, die een versnelling veroorzaakt van 2 m/s2.
Zoals we weten: met een uniforme kracht is de curve die de hoogte als functie van de tijd weergeeft een parabool.
In het 'energie' sub-paneel: de groene curve is een weergave van de minus potentiële energie. Dat wil zeggen: er is een spiegeling toegepast; spiegeling ten opzichte van de horizontale as. Voor deze spiegeling is het nulpunt van de potentiële energie gezet op het punt van hoogte nul. In het algemene geval is het zo dat de keuze van nulpunt van potentiële energie een vrije keuze is. De keuze van nulpunt bepaald de waarde van de integratie-constante. De integratie-constante speelt geen rol, de reden daarvoor is dat bij Hamiltons stationaire actie de afgeleide van de energie wordt gebruikt. De afgeleide nemen heeft als effect dat de integratie-constante weer verdwijnt. Daarom is het niet nodig om aandacht te besteden aan de keuze van nulpunt van potentiële energie.
In het sub-paneel rechts onderaan:
De positie van de blauwe stip vertegenwoordigt de waarde van Hamiltons actie.
Het label van de horizontale as is pv; variatie-parameter.
3.2 Potentiaal neemt toe evenredig met het kwadraat van de verplaatsing
Potentiëele energie neemt toe met het kwadraat van de verplaatsingyal
Graphlet 3.2 is voor het geval waarbij de kracht evenredig met de uitwijking toeneemt; de wet van Hooke.
Zoals we weten: in het geval van de wet van Hooke is de resulterende beweging harmosche oscillatie; de functie die de uitwijking als functie van de tijd geeft is de sinus functie.
Zoals we weten: in het geval van de wet van Hooke neemt de potentiaal toe met het kwadraat van de uitwijking.
Temidden van alle andere potentialen die er kunnen zijn heeft de wet van Hooke een unieke positie: de wet van Hooke is het enige geval waarbij de potentiële energie dezelfde evenredigheid met de beweging heeft als de kinetische energie: kwadratisch.
zoals we weten: bij ideale harmosche oscillatie is het zo dat de periode en de amplitude van de oscillatie onafhankelijk van elkaar zijn; als je de amplitude groter maakt wordt de periode van de oscillatie niet langer of korter.
In het diagram is te zien wat het effect is van het feit dat de potentiële energie en de kinetische energie allebei kwadratisch zijn. Wanneer de schuifregelaar voor de variatie wordt verplaatst veranderen de kinetische energie en de potentiële energie allebei evenveel. Het effect daarvan is: wanneer de amplitude groter of kleiner wordt gemaakt blijft de waarde van Hamiltons actie hetzelfde: nul.
(In het diagram is de daadwerkelijke curve de cosinus functie; het punt is dat het de harmonische oscillatie functie is.)
3.3 Potentiaal neemt toe met de derde macht van de verplaatsing
Potentiële energie evenredig met derde macht van de verplaatsing.
Klik op de knop 'Toon numeriek' voor informatie over hoe de curve in diagram 3.3 onafhankelijk is geverifiëerd.
Onderlinge vergelijking van de drie gevallen
Van de twee componenten van Hamiltons actie, de kinetische energie en de potentiële energie, is het zo dat de uitdrukking voor de kinetische energie een gegeven is: \({E_k=\tfrac{1}{2}mv^2}\). De potentiële energie, aan de andere kant, kan van geval tot geval verschillend zijn. In diagram 3.1 is de potentiële energie een lineaire functie van de hoogte. Dat is 1 macht lager dan de kwadratische uitdrukking voor de kinetische energie. In diagram 3.2 staan de kinetische energie en de potentiële energie op gelijke voet: beide een kwadratische uitdrukking. In diagram 3.3: de uitdrukking voor de potentiële energie is een macht hoger dan de uitdrukking voor de kinetische energie; derde macht versus kwadratisch.
Diagram 3.1:
Wanneer je een rechte lijn hebt en een kwadratische functie: de kwadratische functie groeit in eerste instantie langzamer dan de rechte lijn maar daarna komt een punt dat de kwadratische functie de rechte lijn achter zich laat.
Diagram 3.3:
Een derde macht functie groeit in eerste instantie langzamer dan een kwadratische functie, maar daarna komt een punt dat de derde macht functie de kwadratische functie inhaalt en achter zich laat. Het effect daarvan is terug te zien in het diagram. De blauwe stip vertegenwoordigt de waarde van Hamiltons actie. Ga met de grote schuifregelaar van -1.0 naae 0.0 De blauwe stip beweegt omhoog. Maar van 0.0 naar hogere waarden gaat de blauwe stip weer omlaag: de derde macht functie (potentiële energie) groeit daar sneller dan de kwadratische functie (kinetische energie).
Overzicht van knoppen en schuifregelaars:
Namen voor de 4 sub-panelen:
- boven links: Controle paneel
- onder links: Hoogte paneel
- boven rechts: Energieën paneel
- onder rechts: Integralen paneel
Het patroon: de drie sub-panelen met een coördinatensysteem ontlenen hun naam aan de naam van hun verticale as: Hoogte, Energie, Integraal.
In het controle paneel: de twee schuifregelaars uiterst links veranderen de vorm van het traject. De bovenste vervormt het traject op een manier die de curve stomper maakt dan het ware traject; de onderste maakt het traject driehoek-vormig.
Een eigenschap van deze vervormingen is dat eraan wordt vastgehouden dat gedurende de hele stijgende fase de snelheid nergens veranderd van afnemen naar weer toenemen.
De rij van tien schuifregelaars is voor aanpassing van afzonderlijke knooppunten. De drie radioknoppen schakelen tussen drie groepen van knooppunt aanpassende schuifregelaars.
The '× 1' knop: voor een 1-op-1 verhouding van verplaatsing van de schuifregelaar en verplaatsing van het corresponderende knooppunt van het variatie-traject.
The '× 0.1' knop: verhouding van 10 op 1
The '× 0.01' knop: verhouding van 100 op 1, voor fijn-afregeling.
De knop 'Herstel':
De knop 'Herstel' set de groep van 10 schuifregelaars terug, en het test-traject wordt teruggezet. (De twee verticale schuifregelaars helemaal links vallen niet onder de knop 'Herstel'. Die twee regelaars: uiterste stand is nulpunt.)
De knop 'Consolideren':
Op de knop 'Consolideren' klikken doet het volgende: de bestaande waarden van de '× 0.1' schuifregelaar en de '× 0.01' schuifregelaar worden overgedragen naar de '× 1' slider. Dat wil zeggen: de posities van de '× 0.1' regelaars en de '× 0.01' regelaars worden teruggezet op nul, en de waarde wordt opgeteld bij de '× 1' regelaar.
In het Energieën paneel: de grijze stip kan worden versleept, en de volledige curve van de kinetische energie (rood) wordt dan omhoog/omlaag verschoven. Door de kinetische energie curve te verschuiven naar de potentiële energie curve kan de gebruiker vaststellen of de rode en de groene curve over de gehele lengte van het traject evenwijdig aan elkaar zijn. (De weergave in het Integralen paneel gebruikt de niet-verschoven positie van de kinetische energie curve.
In het Integralen paneel:
· Rode/Groene stip: waarde van de integraal van de rode/groene curve van het Energieën paneel.
· Blauwe stip: de som van de integralen van de kinetische energie en de minus potentiële energie
Met de schuifregelaars het ware traject vinden
De effectieve methode is: maak de vorm van het variatie-traject zodanig dat de kinetische energie curve en de potentiële energie curve overal evenwijdig aan elkaar zijn. Wanneer ze overal evenwijdig aan elkaar zijn brengt dat met zich mee dat de afgeleide naar variatie van Hamiltons actie nul is.
Appendix I: De betekenis van 'stationair'
At the x-coordinate where the red and green curve have equal slope the blue curve is at zero slope.
In diagram I.1 zijn rood en groen allebei klimmende functies. De opdracht: identificeer de coördinaat waar de rode waarde en de groene waarde even snel veranderen. De kortste weg: stel een vergelijking op met de afgeleide van de rode curve aan de ene kant en de afgeleide van de groene curve aan de andere kant.
In het geval van Hamiltons stationaire actie is het ook zo dat twee afgeleiden met elkaar worden vergeleken. In het geval van Hamiltons stationaire actie is het de gewoonte om het volgende proces te gebruiken: definiëer een derde functie, en noem die de Lagrangiaan L. Op het punt waar de afgeleide van de rode curve dezelfde waarde heeft als de groene curve is de waarde van de afgeleide van de blauwe curve nul. De staat van afgeleide-is nul van de blauwe curve wordt 'stationaire actie' genoemd.
Appendix II: Jacobs Lemma
Toen Johann Bernoulli het Brachistochrone probleem had gepresenteerd aan de wiskundigen van zijn tijd was Jacob Bernoulli één van het kleine groepje van wiskundigen die erin waren geslaagd om het probleem op te lossen. De behandeling van Jacob Bernoulli is gepubliceerd in de Acta Eruditorum Mei 1697, PP. 211-217
Jacob opent zijn behandeling met een observatie die betrekking heeft op het feit dat de curve die wordt gezocht een minimum eigenschap heeft.
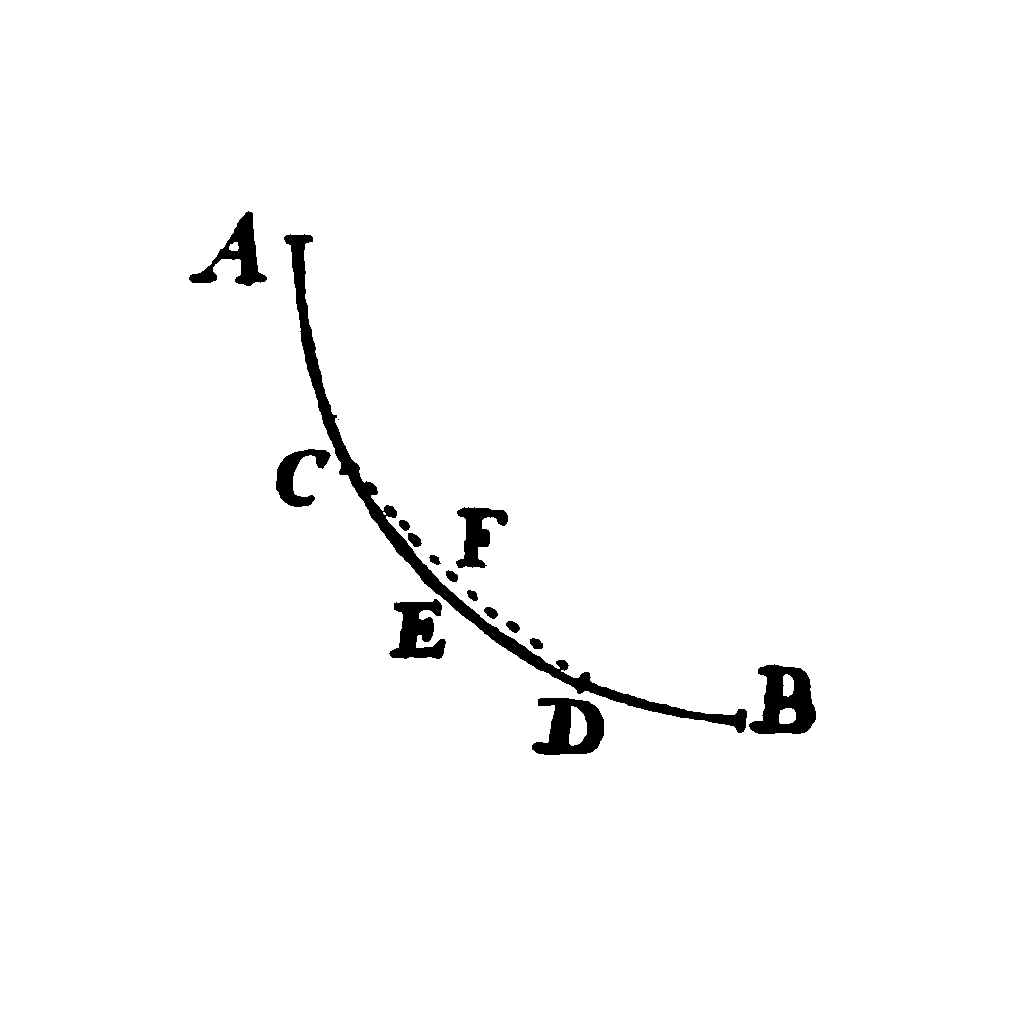
Lemma. Laat ACEDB de gezochte curve zijn, waarlangs een massa valt van A naar B, in de kortst mogelijke tijd, en laat C en D twee punten op die curve zijn, die willekeurig dicht bij elkaar mogen staan. Dan is de sub-sectie CED van alle sub-secties met C en D als eindpunten de sub-sectie waarlangs een massa in de kortste tijd naar beneden beweegt. Als de masse langs een sub-sectie CFD sneller zou vallen dan langs CED, dan zou de massa langs ACFDE vallen in kortere tijd dan langs ACEDB, strijdig met het uitgangspunt.
Jacob's lemma generaliseert naar alle gevallen waarbij de curve die je wil vinden een extremum is; een maximum of een minimum. Als de curve als geheel de eigenschap heeft dat de curve een extremum realiseert, dan wordt dat extremum op iedere sub-sectie van die curve gerealiseerd, helemaal tot aan infinitisimaal kleine sub-secties.
Appendix III:
Benadering van het ware traject met polynoomtermen
De polynoom is de som van de volgende drie termen:
\( \begin{array}{l} - 0.982 (1+t)(-1+t) \\ + 0.400 (1+t) t^2 (-1+t) \\ - 0.150 (1+t)(0.5+t) t^2(-0.5+t)(-1+t) \end{array} \)
De drie schuifregelaars van het diagram corresponderen met de bovenstaande drie termen.
The term op de eerste rij is kwadratisch in \(t\), en geeft dus een parabool. De factor \(0.892\) brengt de parabool naar de hoogte van het ware traject, maar de zijkanten zijn nog te hoog.
De term op de tweede rij maakt de afwijking een stuk kleiner; het effect van de factor \(0.40\) is dat de polynoom bij de coordinaten \(x = -0.5\) en \(x = 0.5\) samenvalt met het ware traject.
The derde term maakt dat er met het blote oog al geen verschil meer te zien is.
Voor de kinetische energie hebben we de afgeleide van de polynoom nodig. Om de differentiatie mogelijk te maken zijn de termen omgewerkt naar de volgende vorm:
\( \begin{array}{l} - 0.982 (t^2 - 1) \\ + 0.400 (t^4 - t^2) \\ - 0.150 (t^6 - 1.25 t^4 + 0.25 t^2) \end{array} \)
De interactieve diagramme op deze pagina zijn gecreëerd met de Javascript bibliotheek JSXGraph. JSXGraph is ontwikkeld aan de Lehrstuhl für Mathematik und ihre Didaktik, Universiteit van Bayreuth, Duitsland.

Tekst, afbeeldingen en animaties zijn beschikbaar gesteld voor anderen onder de volgende voorwaarden:
Creative Commons Attribution-ShareAlike 3.0 Unported License.
Laatste keer dat deze pagina is bewerkt: 14 juni 2026.